近日,我校机械工程夜夜橾b曾达幸教授团队在机器人学领域TOP期刊IEEE Robotics and Automation Letters发表最新研究成果Design and Human-Robot Coupling Performance Analysis of Flexible Ankle Rehabilitation Robot。曾达幸教授为论文第一作者,机械工程夜夜橾b卢文娟副教授为通讯作者,东莞理工夜夜橾b为第一完成单位。

图1 踝关节康复机器人结构模型

图2 人机耦合动力学模型
我国老龄化问题日益严重,由于脑卒中、运动扭伤以及交通事故等原因,导致踝关节运动功能受损的患者人数迅速增长,利用踝关节康复机器人替代传统医师进行康复治疗是未来的发展趋势。然而,目前的踝关节康复机器人研究多采用刚性结构实现运动功能目标,鲜少考虑康复机器人运动要与人体踝关节运动特征相适应,以及康复过程中的人机耦合效果。

图3 人机耦合物理模型
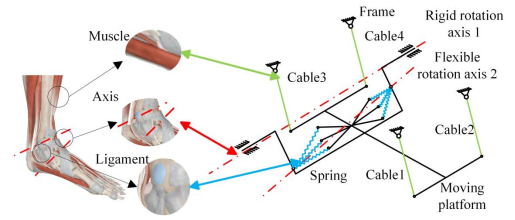
图4 人机映射模型简图
针对传统踝关节康复机器人运动过程中人体与机器人运动特征不匹配以及人机耦合性能差导致关节额外负载等问题,以踝关节康复机器人与绳驱动并联机构的理论研究为基础,以踝关节运动功能障碍康复为研究目标,结合踝关节的生理构造与运动机理,提出了一种具有柔性等效轴线的绳驱动踝关节康复机器人设计方案。基于对康复机器人的理论分析搭建了虚拟样机与工程样机,通过仿真与实验对构型设计的合理性和人机耦合的有效性进行了验证。
论文链接:https://ieeexplore.ieee.org/document/10306273
(撰稿:曾达幸;一审:卢文娟;二审:尹华勤;三审:李长平)
 中文
中文





















